雷达摄像机联动的目标
- 2020-01-08-
1、雷达摄像机联动由雷达和雷达处理软件以及光电系统三部分组成。该系统的运行原理是,雷达对探测区域内能进行搜索获取周围的目标信息,雷达信息处理系统处理时间序列的雷达图像,对图像中的目标回波进行自动识别、跟踪和运动参数解算。
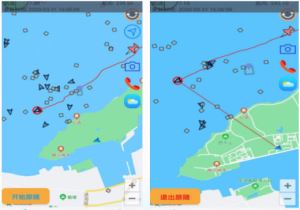
2、雷达摄像机联动目标探测的目的是为了识别防范区域内的目标类型,从而采取不同方案的防范手段。雷达所探测的目标不具备直观性,采用视频分析的方式对视频场景中的运动目标进行分割,与目标模型进行比对后对目标进行区分,从而显示在地图上就相对直观。

3、雷达摄像机联动视频图像依赖光学条件,针对防范地区的气象、地理条件,要因地制宜的配套相应的设备。由于系统采用高清摄像机,长焦镜头的工艺要求较高,其次在长达10Km的远距离监视过程中,云台运行的平稳性、云台运行的精准度均有很高的要求,行业标准中的0.5°的精度对应近88米的距离偏差,因此对硬件的工艺要求比较高;所用的设备如用于海边、高山等地区,低气压、高海拔、高热潮湿、盐碱腐蚀等环境,要求硬件要具备良好的环境适应性。
4、雷达摄像机联动中雷达通过与转台进行连接,再转台上时时进行当前角度目标的距离测量,并时时获取当前转台的角度信息。转台带动雷达旋转,于是就可以把圆形面内目标的角度信息以及距离信息提取出来,并可以通过不同的算法对目标进行区分,并按照相应要求上报PC机。